Primeramente, vamos a revisar el concepto de espectro de respuesta sísmica. Para ello, es importante mencionar que los movimientos sísmicos son registrados a través de acelerogramas, que representan la variación de la aceleración inducida por un sismo en el sitio donde se encuentra instalada la estación sismológica, durante el tiempo que dura el evento.
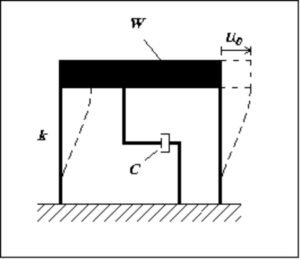
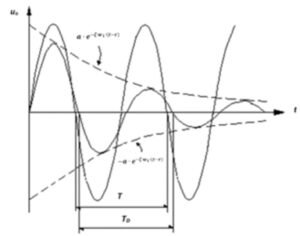
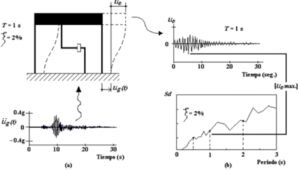
Así, a partir del registro reflejado en el acelerograma, se puede calcular, con una integración numérica sencilla, cuál es la aceleración máxima que se induciría en un oscilador lineal simple con amortiguamiento específico ζ y un período natural T. La gráfica de estas aceleraciones máximas como función del período T, para un oscilador simple supuesto con un amortiguamiento dado, constituye el espectro de respuesta de aceleraciones.
Asimismo, mediante un tratamiento matemático relativamente sencillo del acelerograma, pueden obtenerse las señales correspondientes a velocidades y desplazamientos, y generar también los espectros de respuesta correspondientes. En la Figura 1 se observa un ejemplo de los espectros de respuesta de desplazamiento, velocidad y aceleración combinados en una sola gráfica.