First, let's review the concept of seismic response spectrum. To do so, it is important to mention that seismic movements are recorded through accelerograms, which represent the variation of the acceleration induced by an earthquake at the site where the seismological station is installed, during the time the event lasts.
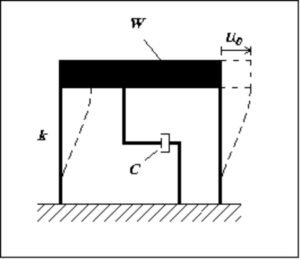
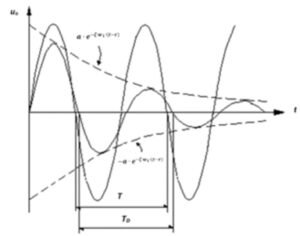
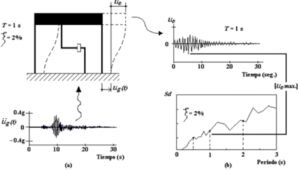
Thus, from the record reflected in the accelerogram, one can calculate, with a simple numerical integration, what is the maximum acceleration that would be induced in a simple linear oscillator with specific damping ζ and a natural period T. The plot of these maximum accelerations as a function of period T, for an assumed simple oscillator with a given damping, constitutes the acceleration response spectrum.
Likewise, by means of a relatively simple mathematical treatment of the accelerogram, the signals corresponding to velocities and displacements can be obtained, and the corresponding response spectra can also be generated. Figure 1 shows an example of the displacement, velocity and acceleration response spectra combined in a single graph.